CDP Studio kinematics support was initially implemented to ease the development of applications for cranes and robotic arms. However, as this example shows, it is very capable of implementing a Stewart Platform (also referred to as motion platform, six-axis platform or 6-DoF platform). The Stewart platform was first used in flight simulators, but have now a wide area of use including NASA for space docking processes, the medical industry or the fun car simulator we tested at a university.
The no-code kinematics model uses DHChain to find the cylinder lengths required to position the platform at any desired location. It also demonstrates the Denavit-Hartenberg kinematic loop solver abilities of CDP Studio.
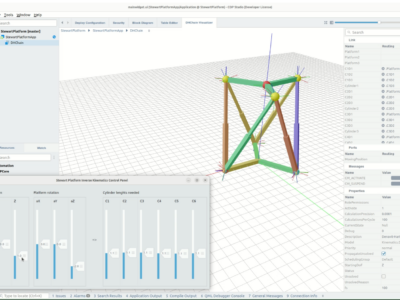
The UI in the video shows setting the platform position (left), setting the platform rotation (middle) and you see the cylinder lengths calculated to achieve the position and rotation (right). The DHChain visualizer shows the system.