Seatex MRU I/O Configuration Manual
Introduction
This document describes how the SeatexMRUIO.SeatexMRUIOServer, SeatexMRUIO.SeatexMRUIOServer_CDPTransport and the SeatexMRUIO.SeatexSerialMRUIOServer components work, and how to set them up and use them within a CDP system.
The SeatexMRUIO.SeatexMRUIOServer and SeatexMRUIO.SeatexSerialMRUIOServer components are used for receiving motion data in 'MRU Normal' format from a Kongsberg Seatex ® MRU.
The SeatexMRUIO.Server_CDPTransport is set up with a CDPTransport, and can be used to handle simulated or tunneled (e.g. through a Wago 750-652 Module) I/O.
About the Seatex Motion Reference Unit
The Kongsberg Seatex Motion Reference Unit is a series of motion sensors that provide high accuracy motion measurements in all dynamic environments. They cover all marine activities, from small hydrographic vessels to large vessels and installations. Take care to read and understand the content of the Seatex MRU manual(s) before setting up and using the MRU in an application.
Usage
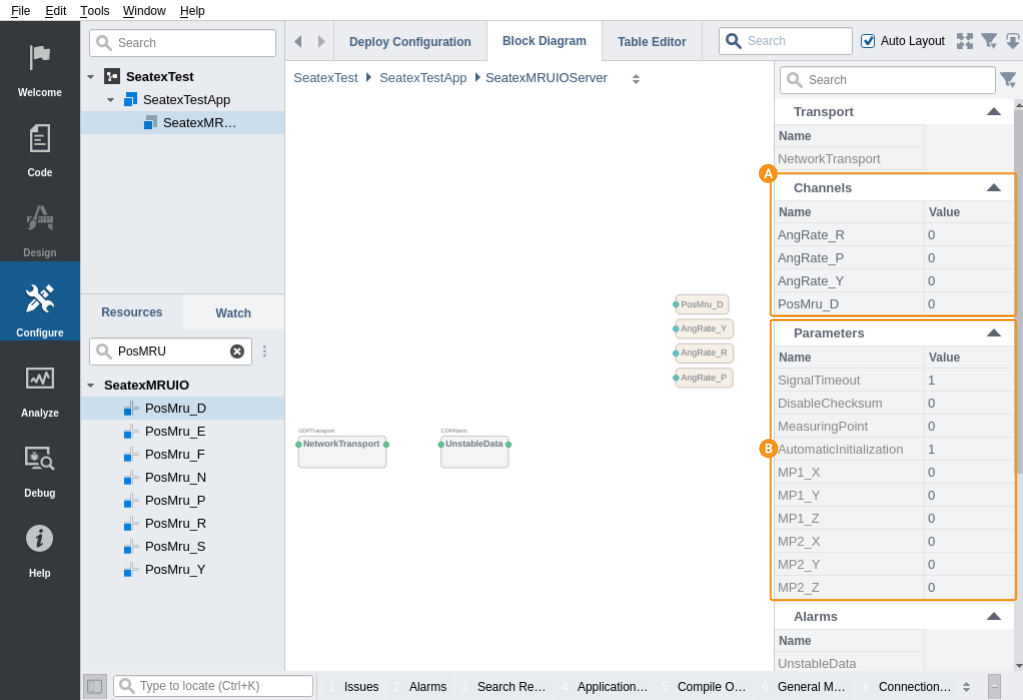
Typically, SeatexMRUIO.SeatexMRUIOServer (UDP transport) is used. For MRUs with serial output, use SeatexMRUIO.SeatexSerialMRUIOServer. Add the IOServer to the application and configure it with specialized channels from the SeatexMRUIO namespace in the Resource tree. Always use these specialized channels instead of the base SeatexMRUIO.MRUChannel,SeatexMRUIO.MRUChannelUInt or SeatexMRUIO.MRUChannelInt, as each channel requires a unique OutputVariable defined by Seatex for proper IOServer functionality.
SeatexMRUIOserver Transport
The SeatexMRUIO.SeatexMRUIOServer Transport table makes it possible to configure how to send and receive MRU packets via UDP, as explained in the UDPTransport documentation. See the table below for default values.
| Name | Value | Description |
|---|---|---|
| Name | NetworkTransport | The name of the transport |
| Protocol | UDP | The Ethernet protocol used is UDP. |
| LocalName | ETH0 | The name, as specified in the Application NetworkInterface, of the local ethernet interface to use to send and receive packets. |
| ListenPort | 7551 | The port to listen for incoming MRU Normal data. This is typically configured in the MRU using the Seatex 'MRC' software that comes with the MRU. When AutomaticInitialization parameter is set to 1, the IOServer will tell the MRU to use this port. |
| RemoteIP | 192.168.1.20 | The IP address to communicate with. The factory IP Address is 192.168.1.20, other configurations may be set using the Seatex 'MRC' software that comes with the MRU. |
| RemotePort | 7550 | The port to send to, typically 7550, but other ports may be set using the Seatex 'MRC' software that comes with the MRU. |
| Timeout | 1 | If nothing is received within this amount of seconds, the SeatexMRUIOServer will report Offline state. |
The SeatexMRUIO.SeatexSerialMRUIOServer Transport makes it possible to configure how to receive packets on Serial. See the SerialTransport for details on how to configure the Serial Transport.
Note: The settings in the transport must match that which is set up in the MRU using the MRC program.
The SeatexMRUIO.Seatex_CDPTransport uses the CDPTransport to receive packets, and expects CM_TEXTCOMMAND messages with telegram data as input.
Autoconfigure Seatex MRU
Autconfiguration of Seatex MRU is not supported in recent Seatex MRU firmware. The section below is kept for reference with old MRUs that support this feature.
To make the Seatex MRU send out the values that you have configured, make sure to set the parameter AutomaticInitialization to 1. This will tell the MRU to send out the configured signals at the SeatexMRUIOServer frequency, as specified by the property fs. Some older versions of the MRU do not support autoconfiguration. AutomaticInitialization should typically be set to 0.
The component frequency can be changed by setting the property fs to the number of times per second that the component should run. If AutomaticInitialization is 1, for the change to propagate to the MRU, either send a Reinitialize message to the component, or restart the application.
Note: If the AutomaticInitialization parameter is not set to 1, the Channels and order must match exactly what the MRU is sending out, or the data will be discarded.
The parameter DisableChecksum can be set to 1 or 0. If it is 1, checksum verification is disabled.
CommunicationToken
The property CommunicationToken must match that which is set up in the MRU using the Kongsberg MRC software, unless AutomaticInitialization is set to 1, in which case CommunicationToken is sent to the MRU and used from there.
Note: It is imperative to set the CommunicationToken to match that which the MRU sends, or the MRU data will be silently discarded.
Measuring points
The MRU supports having up to 2 measuring points (Only used when AutomaticInitialization is 1. These can be configured by setting the parameters MP1_X, MP1_Y, MP1_Z and MP2_X, MP2_Y and MP2_Z. Set the MeasuringPoint parameter to 1 to use MP1, set it to 2 to use MP2 or set it to 3 to use both. If no measuring points are needed, set MeasuringPoint to 0.
Note: Only some values in the MRU output are affected by this change, read the MRU documentation for more information about this.
Supported OutputVariables
Search the SeatexMRUIO namespace in the Resource tree to get a list of all available pre-configured channels that can be added. Each of these channels have a unique OutputVariable setting that matches the knowledge in the MRU. The 'Seatex MRU H Installation manual', Appendix B, lists all the output variables supported by the MRU.
Note: The names used in the SeatexMRUIO resource strives to match the names used in the Seatex documentation, but some variables with colliding names have gotten '_gframe' appended to them to avoid name collision. It is the OutputValue that must be correct in relation to the MRU; this is why the pre-defined channels exist and why they should be preferred.
Troubleshooting
The property Debug can be set to 2 to get error-printouts to help determine the cause of some communication problems.
Get started with CDP Studio today
Let us help you take your great ideas and turn them into the products your customer will love.