KalmanFilter Class
(Automation::KalmanFilter)Simple one dimensional linear Kalman filter operator More...
| Header: | #include <KalmanFilter> |
| Inherits: | CDPOperator<T> |
Public Functions
| KalmanFilter(const CDPPropertyBase &in) | |
| virtual | ~KalmanFilter() |
Reimplemented Public Functions
- 18 public functions inherited from CDPOperator
- 18 public functions inherited from CDPOperatorBase
- 50 public functions inherited from CDPBaseObject
- 30 public functions inherited from CDP::StudioAPI::CDPNode
- 25 public functions inherited from CDP::StudioAPI::ICDPNode
Additional Inherited Members
- 1 public variable inherited from CDPOperatorBase
- 1 static public member inherited from CDPBaseObject
- 1 protected function inherited from CDP::StudioAPI::CDPNode
- 8 protected variables inherited from CDPOperator
- 5 protected variables inherited from CDPOperatorBase
- 10 protected variables inherited from CDPBaseObject
Detailed Description
Simple one dimensional linear Kalman filter operator
This CDP operator can be used to filter measurement noise or inaccuracies using Kalman filter mathematics.
Arguments
| Argument name | Description |
|---|---|
| PNoiseCov | Kalman filter process noise covariance. Can be used to regulate the filtering characteristics (strenght) |
| MNoiseCov | Kalman filter measurement noise covariance. Can be used to regulate the filtering characteristics (strenght). |
| ErrorCov | Kalman filter initial estimation of error covariance. Can be used to regulate filter behaviour on first filtering cycles. Error covariance will be re-calculated on every cycle, therefore this argument has no effect after 2-3 calculation cycles. |
When operator is used inside a signal its default input is automatically tied to signal's InternalValue or previous operator's output. Its default output is automatically tied to next operator's input or to signal's Value. See also CDP Operator Usage In CDP Signals.
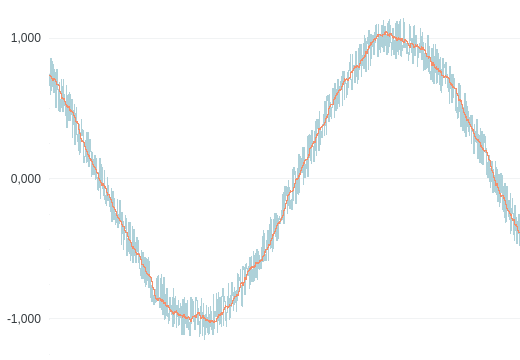
Example
Below is an example plot of noisy signal (cyan) and the same signal with KalmanFilter operator applied (orange):
Actual Processing Code of the KalmanFilter
unsigned int KalmanFilter<T>::Process() { // Set process noise covariance double procNoiseCov = 0.0; if (d->procNoiseCov) { CDPVariantValue procNoiseCov_v = d->procNoiseCov->GetVariantValue(); procNoiseCov = procNoiseCov_v.GetConvertedValue<T>(); } if (procNoiseCov != 0.0) d->SetIdentity2x2(d->KF.processNoiseCov, procNoiseCov); else d->SetIdentity2x2(d->KF.processNoiseCov, d->procNoiseCovDefault); // Set measurement noise covariance double measNoiseCov = 0.0; if (d->measNoiseCov) { CDPVariantValue measNoiseCov_v = d->measNoiseCov->GetVariantValue(); measNoiseCov = measNoiseCov_v.GetConvertedValue<T>(); } if (measNoiseCov != 0.0) d->KF.measurementNoiseCov(0) = measNoiseCov; else d->KF.measurementNoiseCov(0) = d->measNoiseCovDefault; // Set estimation error covariance (on first run only, because it starts to correct at every cycle) if (!d->errorCovInitialized) { double estErrorCov = 0.0; if (d->estErrorCov) { CDPVariantValue estErrorCov_v = d->estErrorCov->GetVariantValue(); estErrorCov = estErrorCov_v.GetConvertedValue<T>(); } if (estErrorCov != 0.0) d->SetIdentity2x2(d->KF.errorCovPost, estErrorCov); else d->SetIdentity2x2(d->KF.errorCovPost, d->estErrorCovDefault); d->errorCovInitialized = true; } // Do Kalman filtering cycle Matrix<double> prediction = d->KF.predict(); d->measurement(0) = (double)m_input; d->KF.correct(d->measurement); m_output = static_cast<T>(prediction(0)); return STATUS_OK; }
See also Argument.
Member Function Documentation
KalmanFilter::KalmanFilter(const CDPPropertyBase &in)
Constructs a KalmanFilter with input in.
[virtual] KalmanFilter::~KalmanFilter()
Destructs the KalmanFilter opeator
[override virtual] void KalmanFilter::Configure(XMLPrimitive *operatorXML)
Reimplemented from CDPBaseObject::Configure().
[override virtual] unsigned int KalmanFilter::Process()
Reimplemented from CDPOperatorBase::Process().
Returns STATUS_OK.
Get started with CDP Studio today
Let us help you take your great ideas and turn them into the products your customer will love.